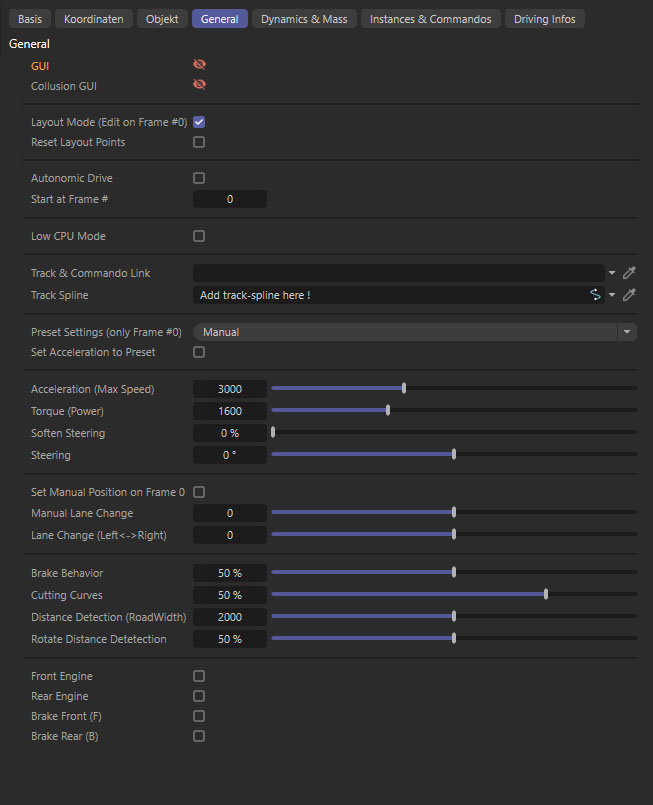
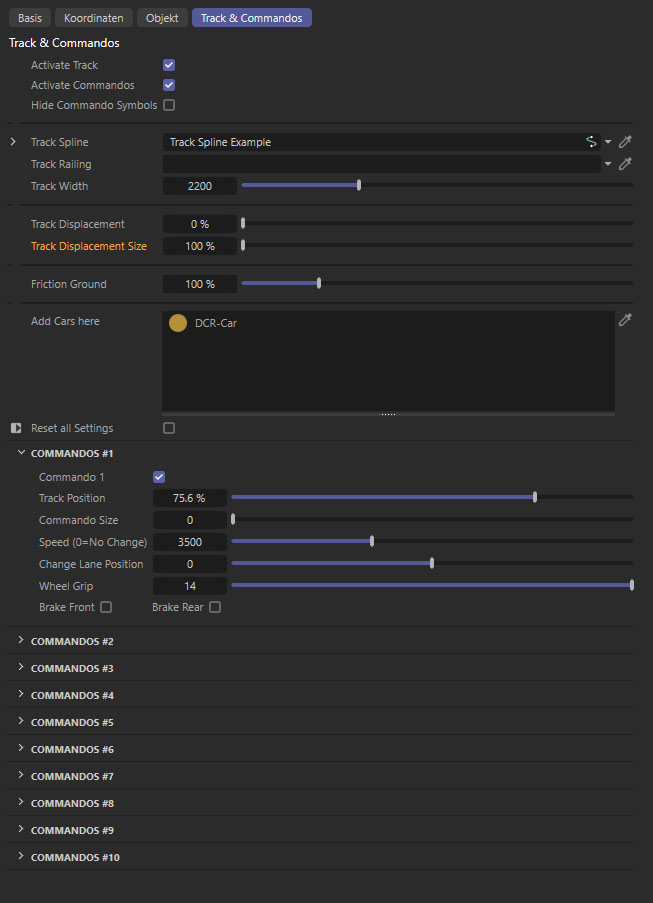
With Brake Behavior, you specify how hard the car brakes or reduces speed before a curve. When the car recognizes the bend in the road depends on the distance from the value of "Distance Detection" ●
The car can countersteer on small bends and cut tight corners. This behavior is controlled with "Cutting Curves" ●
The left road in the animation, the "Brake Behavior" value is low and "Cutting Curves" and "Distance Detection" are set to maximum. The road on right-hand side, "Brake Behavior" is high and "Cutting Curves" and "Distance Detection" are at minimum.
This allows you to choose between aggressive or defensive
driving behavior.

 Impressum
Impressum